菜鸟笔记,因为对camera不是很了解,肯定会有很多疏漏,也会记录一些现在不是很明白的杂乱信息,以便以后知识面扩展了后看到有所帮助。由于自己没有耐心图片一张张重画,就直接拍下了自己手写笔记的照片,笔记图片中的字很丑,将就将就
##VFE
VFE为Video Front End的简写,这属于硬件部分,对于高通通过Chromatix 工具,可以产生对此流程有用的tuning file,用于配置。 VFE 流程图如下: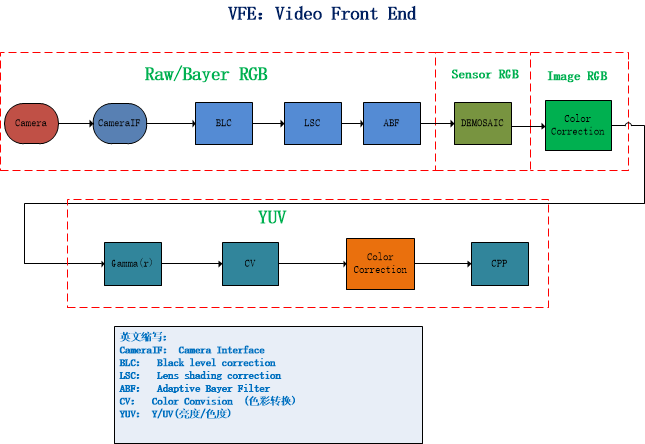
###MIPI
现在的camera基本都采用MIPI接口, MIPI以一种采用差分方式按位传输数据的接口。只有四条引脚(DN、DP,CN、CP)。
###数据
根据自己的理解我大致将VFE根据数据格式分为四个部分:
- Raw RGB(也称为Bayer RGB)
- Sensor RGB
- Image RGB
- YUV
Raw RGB
Raw RGB为原始数据,分为Qcom raw 和 mipi raw, 现在基本都使用mipi raw,mipi raw数据1pixel为10bits的数据(1 chanel),即将所有数据按位重新排列,图像的行列应该为4的倍数。如下: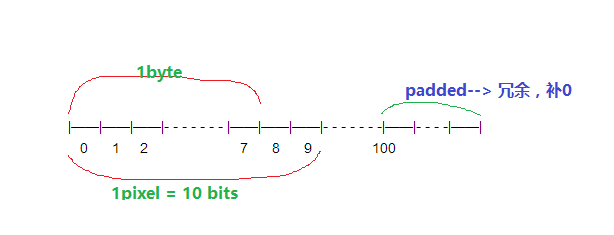
所有pixel图像数据构成按照如下规律排列(表格中为某种颜色的亮度值):
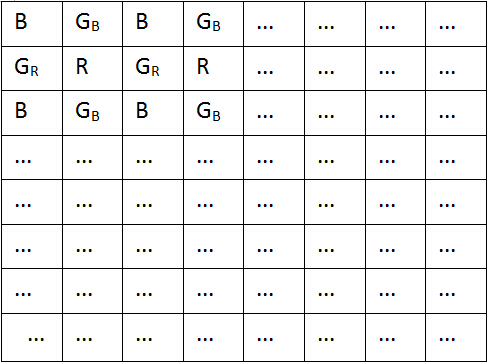
GB: 指靠近B的G. 其余同理
#####Raw RGB数据构成规则按照下表方式排列,对角线可以两两兑换.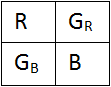
####Raw RGB 有四种排列方式,如下: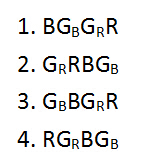
Sensor RGB
Sensor RGB为camera Sensor处理过的数据,即上流程图demosaic之后的数据,1 pixel 为 3 Chanel,现在基本都为888格式的 RGB 24bits数据。
Sensor RGB图像数据构成按如下排列: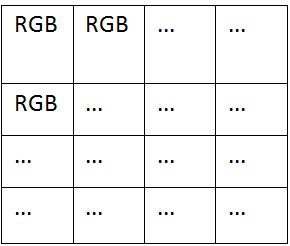
####Image RGB
Image RGB是Sensor RGB通过color correction转变过来的,会按照三种不同光源强度乘以不同的矩阵得到不同的Image RGB,这三种光源强度为:
D65 - daylight color temp 为 6500k
TL - 3800~4000k
A - 2800k
后两种记不清楚了, 简单搜索了一下,没有在网上找到准确的资源,先这样写着
YUV
YUV,分为三个分量,“Y”表示明亮度(Luminance或Luma),也就是灰度值;而“U”和“V” 表示的则是色度(Chrominance或Chroma)。是与RGB类似的颜色编码方法,主要用于计算机端。由Image RGB通过gamma处理而来,如下:
###LSC
LSC即为Lens shading correction, 其主要就是修正边角较暗的地方,如下笔记: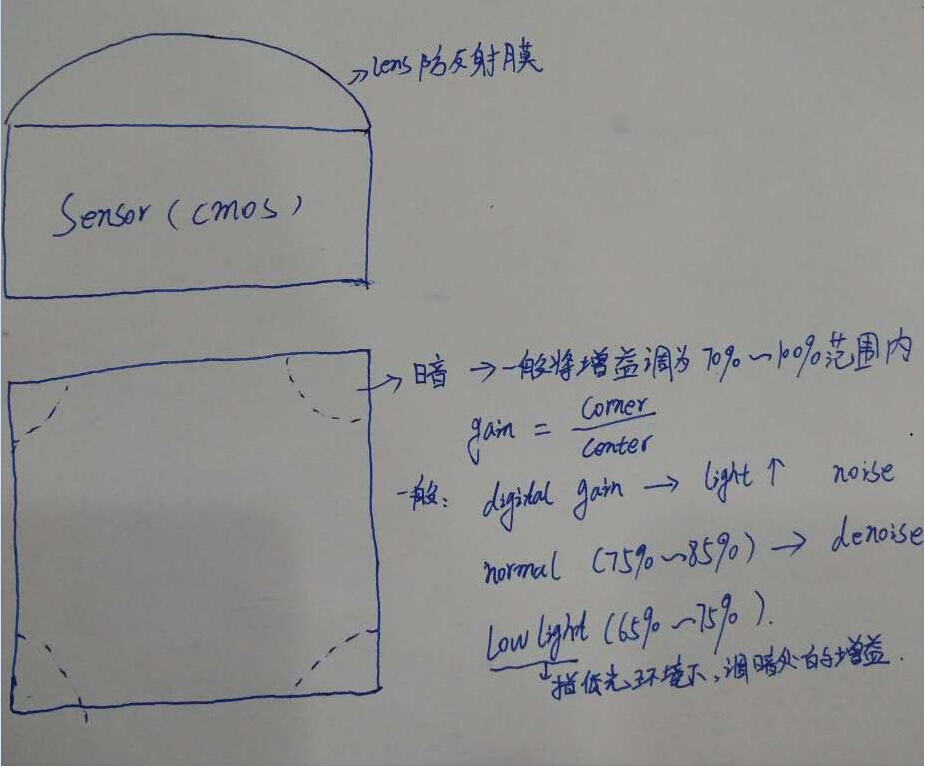
###BLC
BLC即为black level correction,主要处理暗电流,笔记如下: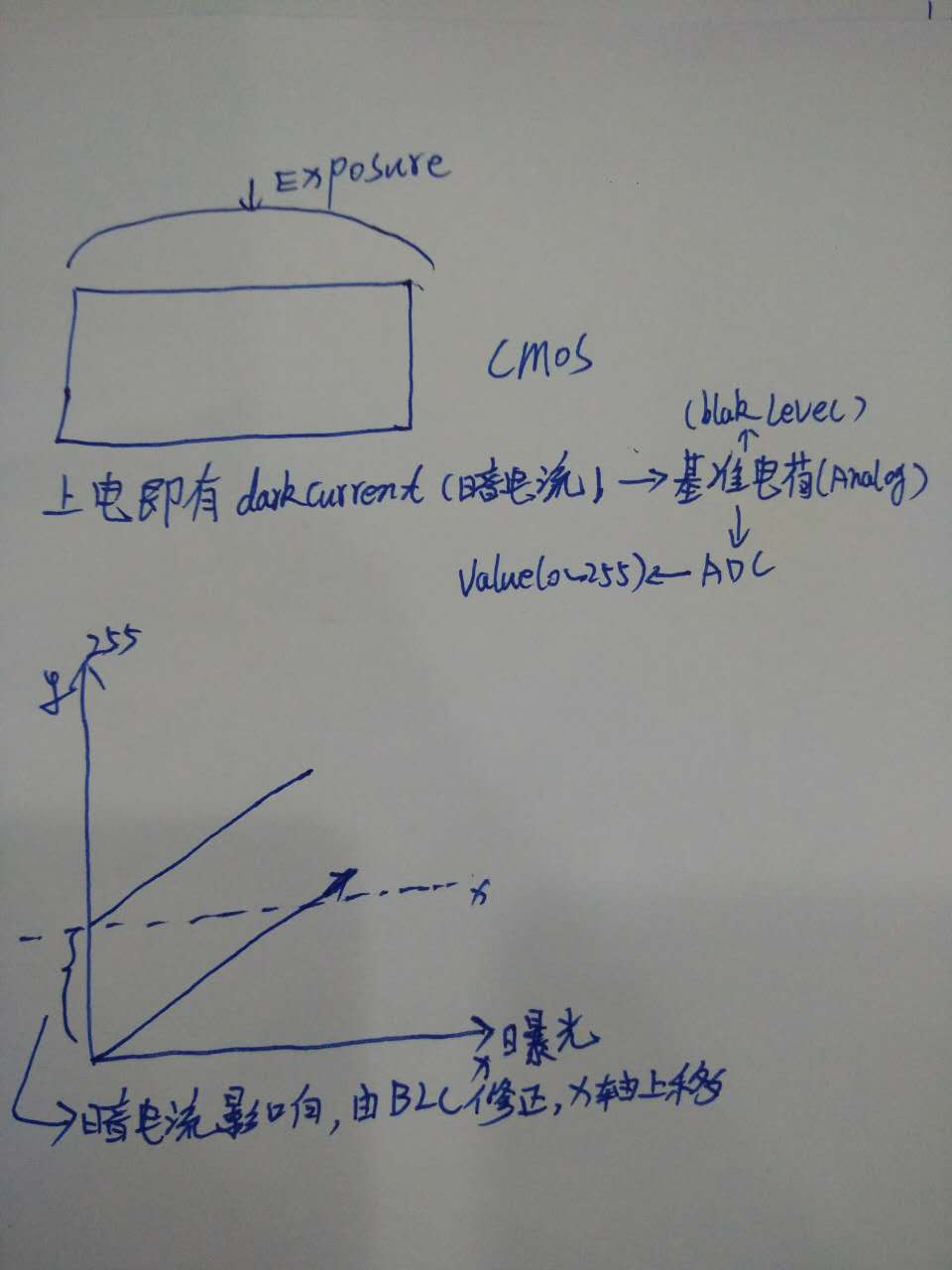
###domain
domain分为spatial domain和frequency domain, 笔记如下: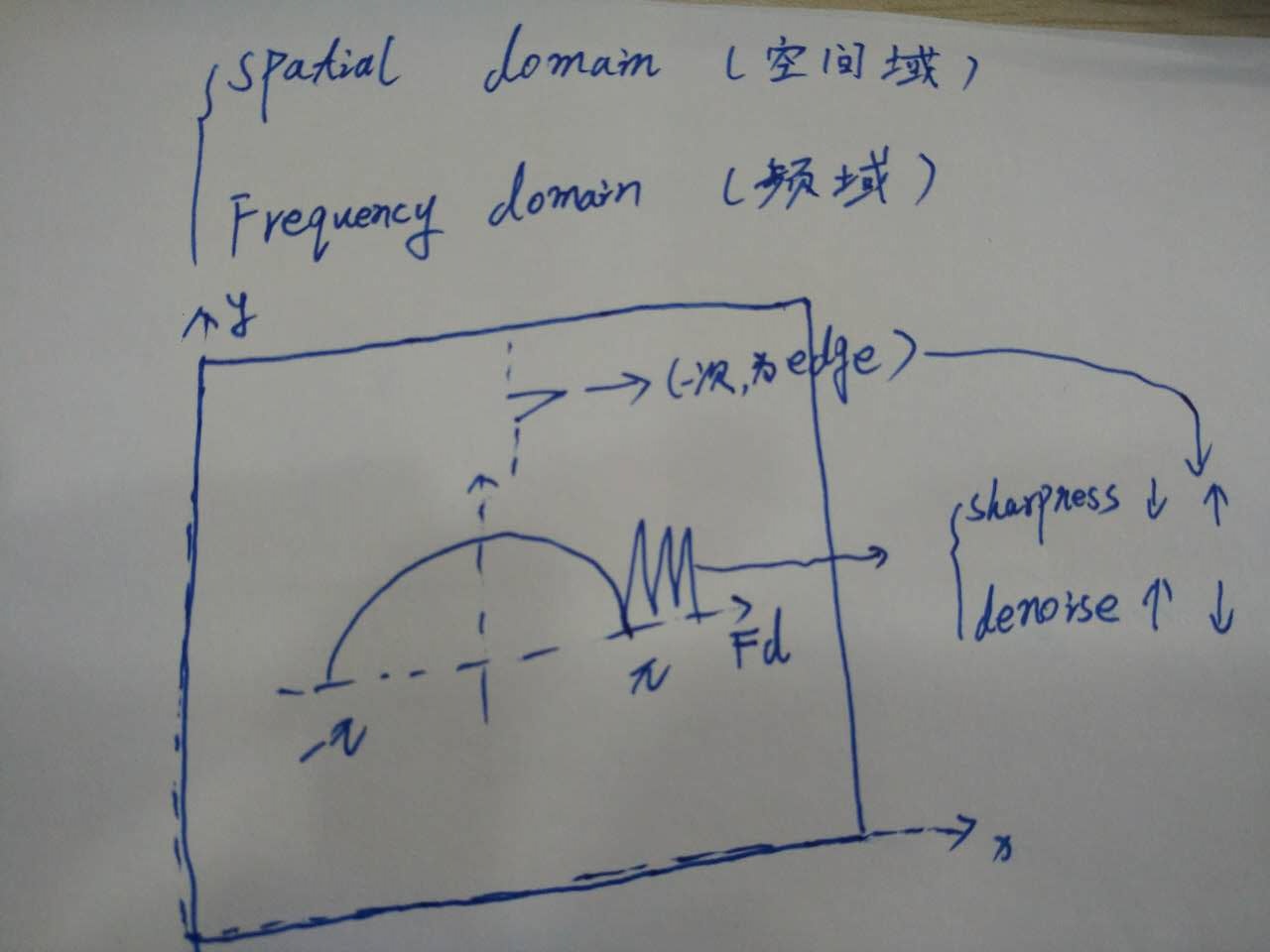
###CPP
VFE模块完成后则会进入CPP模块,cpp模块主要有如下两部分:
- WNR - wavelet noise reduction
- ASF - Auto special Filter (-> sharpness)
exposure index 和 gain index 是cpp模块的trigger condition
附 图片一般会经过4层曝光处理,chromatix工具
附 Chromatix Tool
driver_info.txt (等同于dts中的信息), 通过chromatix产生tuning file(cpp项的 exposure index和gain index很可能源于此文件)
###Driver
驱动中图像处理,笔记如下: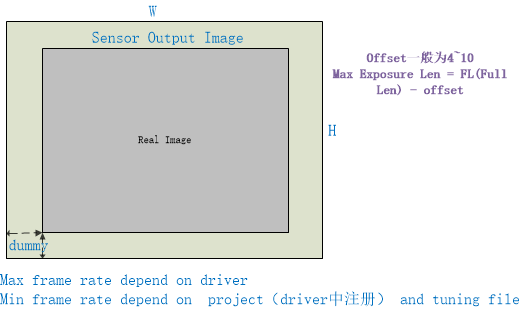
现在的cmos基本都是使用rolling shutter, 方式如下: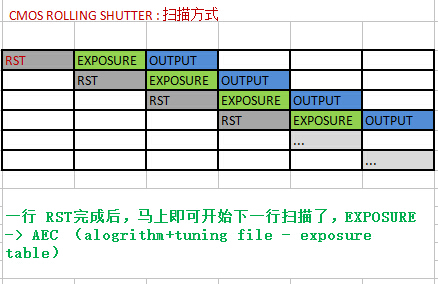
####附 糊涂笔记
VT clock —> banding (50HZ/60HZ/AUTO/OFF —>app上的配置)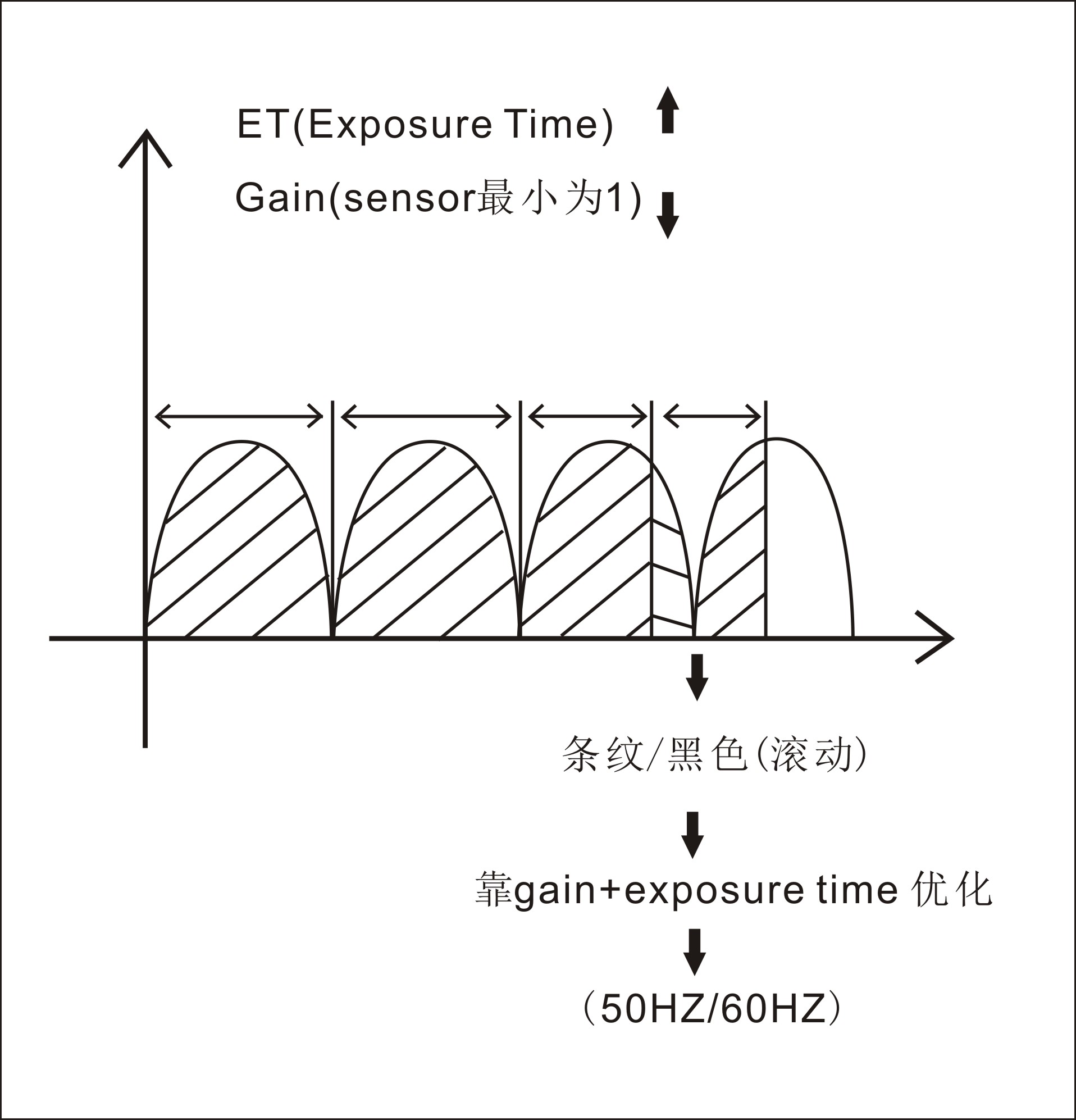
####driver_info.txt
Chromatix Tool会用到的一个Sensor info文件,内容与
1 | 1. max frame rate ---> depends on sensor register and project |