这真的是一篇简析。。。 (╯_╰) 本来准备详细分析整个 sensor 架构的,实在时间紧张,只能先简析了。
Platform information: MTK6797(X20)+ Android 7.0
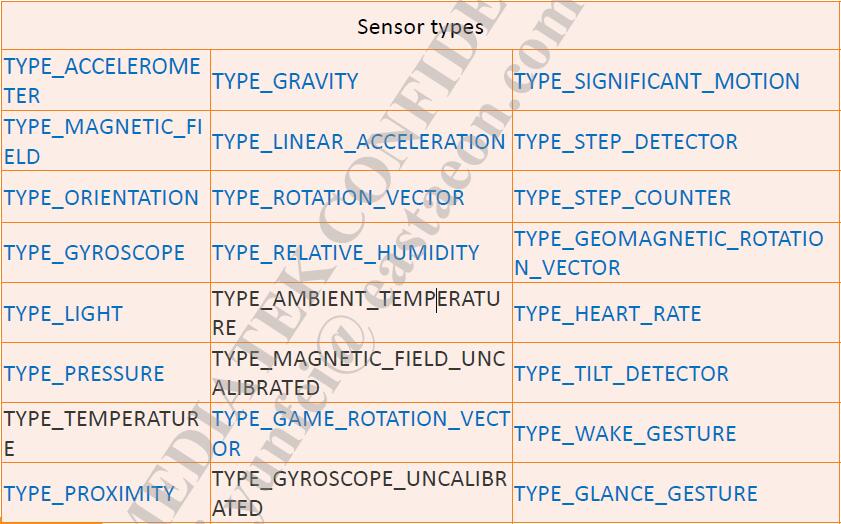
Android 支持的传感器 现在 Android 支持多达数十种的各种各样的传感器,支持的类型如下:
Android Sensor 架构 因为功耗和效率等原因,高通后期平台将 sensor 部分放在 aDSP 中,与如下分析十分不同。
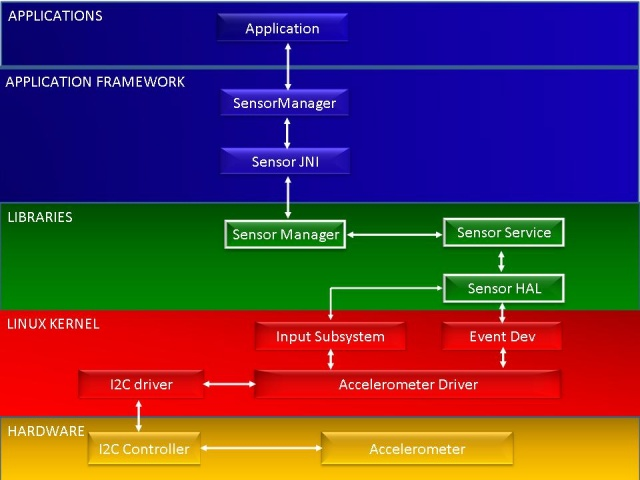
Android 传感器系统架构如下:
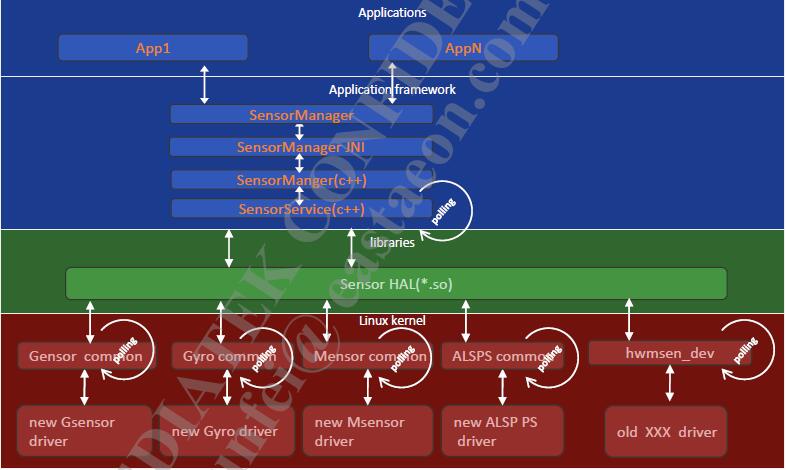
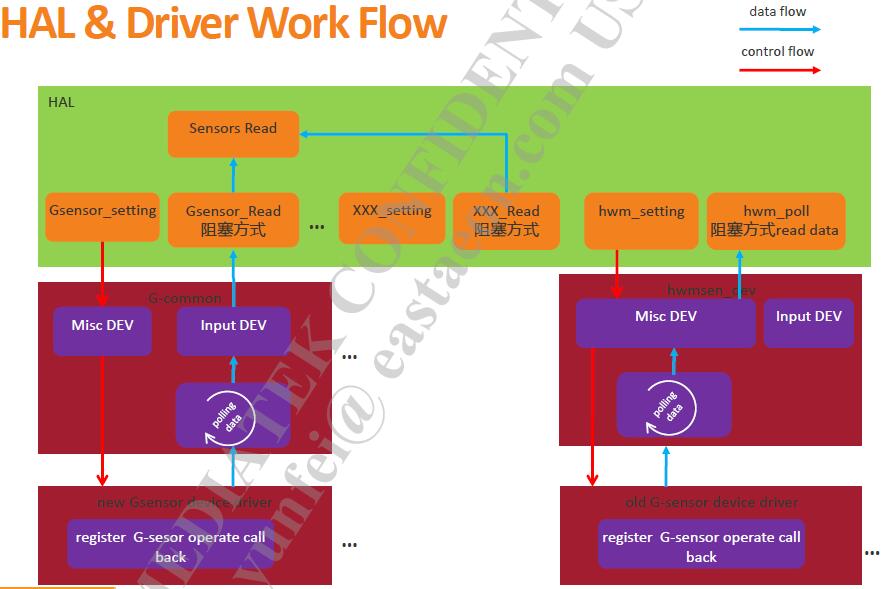
传感器驱动一般会有如下五种数据传输形式:input event设备驱动、MISC驱动、SYS驱动、HWMON设备驱动以及ioctl。如下是一幅网上看到未知来源的图片,更清晰的描述了底层架构,如下:
源码分析 传感器源码架构大致相同,本文就来分析陀螺仪部分源码。
Kernel 部分 传感器几乎都是采用 I2C 总线, 所以先分析一下 I2C 部分。
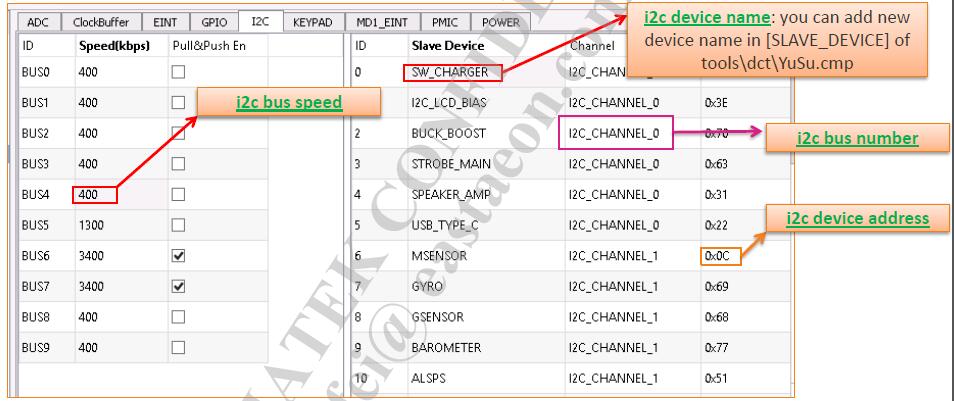
I2C 总线配置 MTK 为GPIO、I2C等配置提供了 DCT 工具, 可以直接在 UI 里面配置好 I2C 相关定义(codegen.dws 文件中),配好后编译会自动生成一些相关的 DTS 文件和头文件(如 cust_i2c.dtsi)。
高通是直接在 dts 里面定义。另需要注意:一条 i2c 总线只支持一种速率,不同速率外设需要挂接到不同总线。
MTK 是在 DCT 配好 i2c 相关(lk 和 kernel 都需要配),如果有兼容 sensor 则配置在 dts 中,如下:
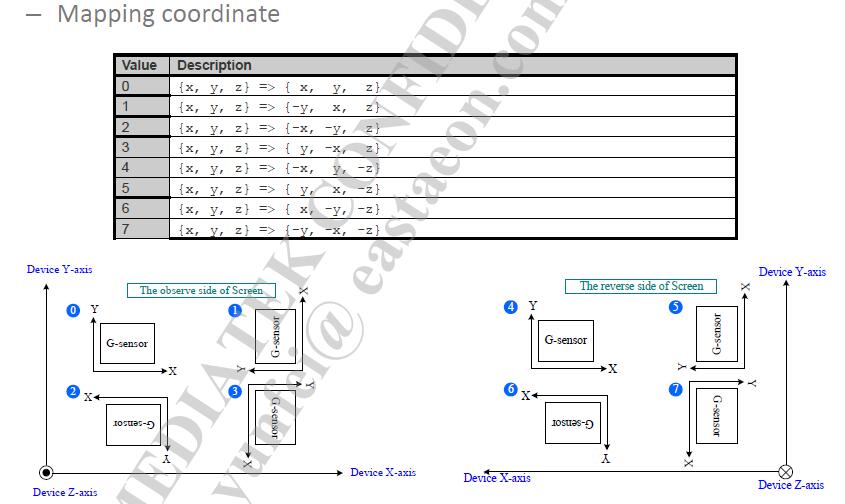
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 i2c0:i2c@11007000 { compatible = "mediatek,mt6797-i2c" ; id = <0>; reg = <0x11007000 0x1000>, <0x11000100 0x80>; interrupts = <GIC_SPI 84 IRQ_TYPE_LEVEL_LOW>; clocks = <&infrasys INFRA_I2C0>, <&infrasys INFRA_AP_DMA>; clock-names = "main" , "dma" ; clock-div = <10>; }; ... /* 兼容 sensor 配置*/ i2c0@11007000 { cust_gyro@6b { // name@i2c_address compatible = "mediatek,xxx_gyro" ; reg = <0x6b>;// i2c 地址 .... }; } cust_gyro@1 { //name@0 为 first sensor 参数 compatible = "mediatek,bmi160_gyro" ; // 驱动解析识别字符 i2c_num = <1>; // i2c channel,硬件决定 i2c_addr = <0x68 0 0 0>; direction = <6>; // 映射坐标,见下图 power_id = <0xffff>; // ldo id power_vol = <0>; // ldo voltage firlen = <0>; // 数据过滤长度, 通常为0 is_batch_supported = <0>; }; ...
关于上面 dts 中 方向参数 direction 取值依据参考下图:
Gyro Driver 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 # alps\kernel-3.18\drivers\misc\mediatek\gyroscope\bmi160_gyro\bmi160_gyro.c bmi160_gyro_init() get_gyro_dts_func() gyro_driver_add(bmi160_gyro_init_info) struct gyro_init_info bmi160_gyro_init_info bmi160_gyro_local_init () i2c_add_driver (&bmg_i2c_driver) static struct i2c_driver bmg_i2c_driver bmi160_gyro_i2c_probe () hwmsen_get_convert () bmg_init_client () misc_register () bmg_create_attr () gyro_register_control_path () gyro_register_data_path () device_register () device_create_file ()
Gyro Common 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 # alps\kernel-3.18\drivers\misc\mediatek\gyroscope\inc\gyroscope.h struct gyro_control_path { int (*open_report_data)(int open); int (*enable_nodata)(int en); int (*set_delay)(u64 delay); bool is_report_input_direct; bool is_support_batch; int (*gyro_calibration)(int type, int cali[3 ]); bool is_use_common_factory; }; struct gyro_data_path { int (*get_data)(int *x, int *y, int *z, int *status); int (*get_raw_data)(int *x, int *y, int *z); int vender_div; }; # alps\kernel-3.18\drivers\misc\mediatek\gyroscope\gyroscope.c gyro_probe() gyro_real_driver_init() gyro_input_init() input_register_device(dev) gyro_driver_add() platform_driver_register() # alps\kernel-3.18\drivers\misc\mediatek\gyroscope\gyrohub\gyrohub.c
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 # alps\vendor\mediatek\proprietary\hardware\sensor\sensors.c struct sensor_t sSensorList [] ={ { .name = GYROSCOPE, .vendor = GYROSCOPE_VENDER, .version = 3 , .handle = ID_GYROSCOPE+ID_OFFSET, .type = SENSOR_TYPE_GYROSCOPE, .maxRange = GYROSCOPE_RANGE, .resolution = GYROSCOPE_RESOLUTION, .power = GYROSCOPE_POWER, .minDelay = GYROSCOPE_MINDELAY, .maxDelay = 1000000 , .flags = SENSOR_FLAG_CONTINUOUS_MODE, .reserved = {} }, ... } open_sensors() init_nusensors()
附 1 2 /sys/bus/platform/drivers/xxx
驱动数据和控制流: